




ESTRUCTURA
DE UNA COMPUTADORA DEFINICIONES
PC: Personal Computer
CPU: Unidad central de proceso
HARDWARE: Es el grupo
de elementos físicos. La elección e identificación de los componentes físicos
de una computadora personal, pueden parecer tareas muy difíciles; pero podemos
simplificar su estudio, clasificándolos como dispositivos de procesamiento, de
almacenamiento y de entrada y salida de datos; también existen dispositivos
mixtos que hacen estas dos últimas funciones.

DISPOSITIVOS DE ENTRADA DE DATOS Medios con que el usuario proporciona ordenes, comando, instrucciones
y datos diversos a la computadora, para que esta lo procese. Entre ellos
tenemos el scanner, el teclado, el mouse y los parlantes.

DISPOSITIVOS DE SALIDA DE DATOS Dispositivos que proporcionan al usuario el resultado final del
procesamiento de información. Entre ellos tenemos al monitor, la impresora y
las bocinas

DISPOSITIVOS DE PROCESAMIENTO DE DATOS Elementos que realizan el trabajo pesado del
equipo de cómputo. Procesan los datos introducidos por el usuario; y de acuerdo
con los pasos determinados por un programa, proporcionan un resultado específico,
como la Board, el procesador y la tarjeta de vídeo

TARJETA DE VÍDEO Es otro
elemento que procesa información, ya que las modernas tarjetas gráficas
incluyen poderosos circuitos de manejo de imágenes. Estos circuitos permiten
presentar complejos escenarios tridimensionales con calidad casi fotográfica,
sin saltos no discontinuidades. Una buena tarjeta gráfica moderna, bien puede
costar 2 o 3 veces más que una tarjeta madre de buena calidad.

MICROPROCESADOR Es el
componente más importante en la estructura de una computadora, ya que realiza
todas las operaciones lógicas que permiten la ejecución de los diversos
programas; desde un simple procesamiento de texto, hasta el más avanzado
retoque fotográfico o diseño gráfico. De este dispositivo, depende de la
potencia final del sistema.

TARJETA MADRE Es el puente
de comunicación entre el microprocesador y todos sus circuitos auxiliares. Si
el microprocesador necesita un dato de la memoria lo solicita a la tarjeta
madre; y esta se lo envía, luego de recuperarlo de los módulos de RAM. Si se
desea expedir información en la pantalla, el microprocesador la manda a la
tarjeta madre; y esta la hace llegar a la tarjeta de vídeo, que finalmente
genera las señales que serán enviadas al monitor. La tarjeta madre es el
segundo elemento más importante en la estructura de una PC.

MEMORIA Es el
principal almacén temporal de datos del microprocesador. Cuando se está
ejecutando un programa, una buena parte de su código, al igual que los resultados
que se van obteniendo, permanecen en la memoria. Mientras mayor cantidad de RAM
tenga un sistema, mejor funcionara.

GENERACIONES DE LOS MICROPROCESADORES
Creado para una línea de calculadoras (Busicom)
Cambio el concepto de microprocesador pasando de
especifico a estandar
Trabaja con palabras de 4 Bits
El ciclo de
instrucción es de 10,8 microsegundos
Primera Generación: El 8080 en 1973, es el primer microprocesador útil para
cualquier tipo de operación, funcionaba a 1 MHz con un ancho de 8 bits, lo cual
le permitía manejar 64KB de RAM, otros fabricantes como Motorola con su M6800 y
Zilog con su Z80, también se dedicaban a construir microprocesadores pero
destinados al sector industrial y científico. En 1978 llegan los procesadores a
16 bits de ancho de bus que ya permiten manejar 1MB de RAM, como el 8086 de
Intel, el Z800 de Zilog y el 6800 de Motorola. De estos tres fabricantes sólo
Intel y Motorola prosperaron. Los procesadores Intel fueron la base de los
Personal Computer (PC) de la familia x86 y Motorola fue la base de los primeros
Apple y plataformas Unix. IBM decidió crear el PC.Trabaja con palabras de 16
bits. Los modelos mas importantes fueron el 8086 y su
variante 8088.

Segunda Generación:
Alcanza los 16 Mb de RAM.
Trabaja con palabras de 16 bits de extensión.
Se fabrican dispositivos de hasta 25 MHz de
velocidad.
El modelo mas importante es el 80286.

Tercera Generación: : El
80386, año 1985, primer procesador de 32 bits de ancho del que solo Windows
sacaba provecho ya que DOS no podía. Trabajaban a velocidades entre 16 y 33 MHz
Incluyeron un Pipeline de 4 etapas, era posible adquirir el modelo 80386DX que
integraba en el núcleo la FPU (Coprocesador Matemático) que permitía trabajar
con gráficos, también se podía adquirir el 80386SX que era la versión económica
sin FPU pero que permitía adquirirlo posteriormente comprando el 80397 (que es
la FPU) y que se montaba en un socket al lado de la CPU, otra limitación del SX
es que le redujeron el ancho de banda a 16 bits lo que le permitía utilizar
hasta 16MB RAM. Llegó al límite de los 4 Gb de RAMTrabaja con
palabras de 32 bits. El modelo mas importante es el 80386.Una de las
ventajas de este microprocesador es el “modo de memoria protegida”, que permite
ejecutar 2 o más apicaciones al mismo tiempo. En esta época, finales de los 80, aparecieron los microprocesadores AMD
y Cyrix.

Cuarta Generación:
Alcanza los 133 MHz de velocidad.
Se
incorporo un bloque especial de manejo de operaciones matemáticas con punto
flotante (conocido como FPU o unidad de punto flotante)
Para garantizar un constante flujo de datos, se
introdujeron unos pequeños bloques de memoria RAM de alta velocidad, conocida
como Caché.
El modelo mas importante es el i486.

Quinta Generación: Pentium 1993, primera tecnología de Intel que incorpora una
arquitectura súper escalada. Esto quiere decir que incorporaba dos unidades de
procesamiento o pipelines trabajando en paralelo por lo que podía ejecutar dos
instrucciones por ciclo de reloj esta CPU también incremento a 64 bits el ancho
del bus FSB y subió su frecuencia de 33 a 66MHz, su nueva arquitectura le
permitió aprovechar el incremento constante de la velocidades de trabajo de las
CPU’s. Cyrix se retira. AMD saca su K5 en el 1994 procesador de 32 bits de AMD
que no tuvo éxito y con un flujo rendimiento respecto a Pentium, utilizaba un
pipeline de 6 etapas para los números enteros y así poder incrementar algo su
potencia de trabajoAparecen
sobre el año 1993.
Se componen de los Pentium en cuanto a Intel, los AMD K5 y K6 y los
Cyrix 6x86.
Su principal característica es que eran capaces de ejecutar varias
instrucciones en un solo ciclo de reloj gracias a su bus externo de 64bits.

Sexta Generación: El Pentium PRO del año 1995 orientado a entorno profesional,
servidores y equipos de gama alta, incorpora un pipeline de 14 etapas y un
juego de instrucciones RISC que permite el trabajo en multiproceso en placas
capaces de alojar 2 o 4 CPU´s, introdujo como gran mejora el DIB(Arquitectura
Independiente Dual) que permite a la CPU enviar y recibir información diferente
por los 2 buses de los que dispone (uno con la RAM y otro con la cache). Esto
incremento mucho el rendimiento, el cual subió aun mas porque fue el primer
micro que integró cache L2 en su núcleo, además modifico a 36 bits el bus de
direcciones para poder manejar hasta 64 GB de RAM.
Pentium MMX
del año 1997 incorpora el juego de instrucciones MMX con 57 nuevas
instrucciones para el tratamiento multimedia y aumenta el doble la cache L1
para aumentar la velocidad de trabajo de la CPU y que el rendimiento suba
proporcionalmente. Pentium II en el año 1997 (diferencia con el anterior, 9
meses aprox.) Es una versión reducida del Pentium PRO pero añadiendo las
instrucciones MMX el CORE inicialmente se llamo Klamath y la versión más
avanzada tiene el nombre de Deschutes. Esta CPU incorpora cache L2 pero no
integrada pero montada al lado del CORE en una placa con lo que trabaja a la
mitad de velocidad que la CPU. Este conjunto fue un nuevo tipo de cartucho y de
socket conocido como SLOT1. Esta CPU incorporó un nuevo Pipeline para la FPU
con lo que ya podía ejecutar hasta 3 instrucciones por ciclo de reloj.
Aparecen a mediados de los años 90 Aparece el Procesador Pentium Pro y
con el un nuevo concepto que incluye dos chips dentro de una sola pastilla.Este
procesador dio lugar a los Pentium II, Pentium III y algunas versiones del
Celeron.
Séptima Generación: AMD lanza el
Athlon y supera a Intel por primera vez en la historia basando su
microprocesador en mejora en cálculos y operación con coma flotante. Intel lanza
el Pentium IV capaz de alcanzar una velocidad de reloj de 4Ghz. Cyrix fue
adquirida por Via y lanzo el procesador C3 para una versión económica de PC´s.
Procesadores
Doble Núcleo (Dual Core). Integran dos cores en un mismo chip compartiendo
elementos comunes como la RAM haciendo imposible de esta manera que realmente
se doble el rendimiento. Los primeros modelos incluso compartían una misma
cache L2. Pentium D en el 2005, procesador de doble núcleo a cuyo CORE llamaron
Smithfield que en realidad eran dos cores Prescott pegados. En este CORE
tuvieron que bajar el FSB hasta 300 porque no aguantaba velocidades tan altas
sacaron modelos de los que iban a los 2,8Ghz a los 3,4GHz pero con el problema
añadido de que se comunicaban ambos CORES a través de un bus. Lo que hacía que
bajara el rendimiento, aúna así este procesador aumentó el rendimiento en la
compresión de video y en la atención de múltiples procesos en sistemas
servidor. En los modelos económicos desactivaban el Hyper-Threading y en los
modelos en los que no se desactivaba había el problema de que no todos los
sistemas operativos estaban preparados para trabajar con cuatro CORES. El
núcleo Presler con tecnología de 0.0065 micras o 65nm le permitió volver a su
FSB QDR 266 (1066) a 3,73GHz. Estos núcleos Presler tenían un elevado gasto
energético y una necesidades de refrigeración bastantes costosas.
Octava Generación:
Ancho de bus
de 64 bits. Con esta generación de procesadores ponemos obtener un mayor
rendimiento siempre que los datos que procesemos sean de un gran tamaño porque
el bus de datos en este sistema tiene un ancho de 64 bits en lugar de los 32
que tenían los de las generaciones anteriores. Evidentemente no siempre estamos
procesando datos de gran tamaño y en ese caso no obtenemos ninguna mejora
práctica.
Athlon 64 (año 2003). Como los Athlon XP quedaron sin futuro al apenas superar los 2GB, aun reduciendo la tecnología de fabricación, AMD tuvo que diseñar una nueva arquitectura a la que llamó HAMMER y que internamente se conoce como el K8. Esta arquitectura tiene tres grandes familias: los Athlon64, Athlon 64 FX y los Opteron, siendo estos últimos los destinados a servidores y equipos de gama alta. Aunque esta arquitectura aprovecha gran parte de las características de un Athlon XP por ejemplo tiene también 3 ALUs y 3 FPUs, como novedades de diseño presenta las siguientes:
- Integra el controlador de memoria del puente norte en la CPU, de forma que desaparece el puente norte para estas CPU´s quedando integrados en el CORE. Y trabajando así los dos a la misma velocidad, eliminando los tiempos de espera que se producían entre varios chips. Con esto conseguían un ancho de banda mayor que les permitía superar a los Pentium4.
- Nuevo juego de instrucciones e 64 bits llamado X86.64 o AMD64 que será el 100% efectivo cuando todos los programas y sistemas operativos estén diseñados para 64 bits.
- Aún así se mejora la ejecución de programas a 64 bits ya que incluye una unidad que se encarga de hacer la conversión de 32 a 64 bits.
- Pipeline de 12-13 etapas, para llegar a los 3.2 GHz manteniendo un buen rendimiento en su diseño.
- Mejora del manejo de las instrucciones SSE soportando las instrucciones SSE2 y SSE3 en los últimos modelos.
- La gama alta FX y Opteron, soporta la memoria DDR en Dual-Channel y el FSB tiene 128bits de ancho, utiliza los sockets 754 en modelos viejos, 939 que permite el trabajo en Dual-Channel, 940 que necesita memoria registrada y solo lo utilizan los Opteron, el AM2 para memoria DDR2 y el AMD2+ que soporta el bus Hypertransport 3.0
- La comunicación con el puente sud utiliza un nuevo bus serie llamado Hypertransport que va de HT800MHz a HT200MHz. A través de este bus se comunica a la CPU a través de cualquiera de los dispositivos del bus. Los Opteron tienen la característica de poder trabajar en placas bases con 2 o 8 CPU´s compartiendo 64GB de memoria RAM.
- Tecnología NxBit que impide el acceso a ciertas zonas de la memoria actuando como barrera antes los virus.
- Cool ‘n’ Quiet. Tecnología que permite bajar la frecuencia de trabajo hasta 1GHz y en algunos portátiles hasta menos; el voltaje de la CPU lo disminuye a 1.4 voltios a 1.1 voltio para ahorrar energía en los momentos en los que no hay carga de trabajo. Esta tecnología es más eficiente que la EIST desarrollada por INTEL
Con el socket AM2 de 940 contactos (no confundir con el socket 940 de los Opteron), Athlon comienza a utilizar memoria DDR2 mientras que antes solo utilizaba memoria DDR a 400 con la que obtenía un excelente rendimiento aprovechándose de sus bajas latencias. Caso que con la DDR2 no obtiene.
Athlon 64 (año 2003). Como los Athlon XP quedaron sin futuro al apenas superar los 2GB, aun reduciendo la tecnología de fabricación, AMD tuvo que diseñar una nueva arquitectura a la que llamó HAMMER y que internamente se conoce como el K8. Esta arquitectura tiene tres grandes familias: los Athlon64, Athlon 64 FX y los Opteron, siendo estos últimos los destinados a servidores y equipos de gama alta. Aunque esta arquitectura aprovecha gran parte de las características de un Athlon XP por ejemplo tiene también 3 ALUs y 3 FPUs, como novedades de diseño presenta las siguientes:
- Integra el controlador de memoria del puente norte en la CPU, de forma que desaparece el puente norte para estas CPU´s quedando integrados en el CORE. Y trabajando así los dos a la misma velocidad, eliminando los tiempos de espera que se producían entre varios chips. Con esto conseguían un ancho de banda mayor que les permitía superar a los Pentium4.
- Nuevo juego de instrucciones e 64 bits llamado X86.64 o AMD64 que será el 100% efectivo cuando todos los programas y sistemas operativos estén diseñados para 64 bits.
- Aún así se mejora la ejecución de programas a 64 bits ya que incluye una unidad que se encarga de hacer la conversión de 32 a 64 bits.
- Pipeline de 12-13 etapas, para llegar a los 3.2 GHz manteniendo un buen rendimiento en su diseño.
- Mejora del manejo de las instrucciones SSE soportando las instrucciones SSE2 y SSE3 en los últimos modelos.
- La gama alta FX y Opteron, soporta la memoria DDR en Dual-Channel y el FSB tiene 128bits de ancho, utiliza los sockets 754 en modelos viejos, 939 que permite el trabajo en Dual-Channel, 940 que necesita memoria registrada y solo lo utilizan los Opteron, el AM2 para memoria DDR2 y el AMD2+ que soporta el bus Hypertransport 3.0
- La comunicación con el puente sud utiliza un nuevo bus serie llamado Hypertransport que va de HT800MHz a HT200MHz. A través de este bus se comunica a la CPU a través de cualquiera de los dispositivos del bus. Los Opteron tienen la característica de poder trabajar en placas bases con 2 o 8 CPU´s compartiendo 64GB de memoria RAM.
- Tecnología NxBit que impide el acceso a ciertas zonas de la memoria actuando como barrera antes los virus.
- Cool ‘n’ Quiet. Tecnología que permite bajar la frecuencia de trabajo hasta 1GHz y en algunos portátiles hasta menos; el voltaje de la CPU lo disminuye a 1.4 voltios a 1.1 voltio para ahorrar energía en los momentos en los que no hay carga de trabajo. Esta tecnología es más eficiente que la EIST desarrollada por INTEL
Con el socket AM2 de 940 contactos (no confundir con el socket 940 de los Opteron), Athlon comienza a utilizar memoria DDR2 mientras que antes solo utilizaba memoria DDR a 400 con la que obtenía un excelente rendimiento aprovechándose de sus bajas latencias. Caso que con la DDR2 no obtiene.

Estos procesadores acaban de aparecer y su caracteíísta principal es que
aumentan las prestaciones frente a la velocidadEstos procesadores trabajan
con palabras de 64 bits lo cual supone un paso mas en la evolución.
Características:
-Contiene 234 millones de transistores
-Tecnología de 90 Nanómetros.
-Soporte para múltiples sistemas operativos simultáneos
-Multi-Núcleo con gran capacidad de procesamiento
-Velocidad de procesamiento de mas de 4Ghz en las primeras pruebas.
Generación
de energía eléctrica
Se lleva a cabo mediante técnicas muy
diferentes. Las que suministran las mayores cantidades y potencias de
electricidad aprovechan un movimiento rotatorio para generar corriente
continua en una dinamo o corriente alterna en
un alternador. El movimiento rotatorio resulta a su vez de una fuente
de energía mecánica directa, como puede ser la corriente de un salto
de agua o la producida por el viento, o de un ciclo termodinámico. En este
último caso se calienta un fluido, al que se hace recorrer un circuito en el
que mueve un motor o una turbina. El calor de este proceso se
obtiene mediante la quema de combustibles fósiles, reacciones
nucleares y otros procesos.
La generación de energía eléctrica es una
actividad humana básica, ya que está directamente relacionada con los
requerimientos actuales del hombre. Todas la formas de utilización de las
fuentes de energía, tanto las habituales como las denominadas alternativas o no
convencionales, agreden en mayor o menor medida el ambiente, siendo de
todos modos la energía eléctrica una de las que causan menor impacto.
Desde que se descubrió la corriente
alterna y la forma de producirla en los alternadores, se ha llevado a cabo
una inmensa actividad tecnológica para llevar la energía eléctrica a todos los
lugares habitados del mundo, por lo que, junto a la construcción de grandes y
variadas centrales eléctricas, se han construido sofisticadas redes de
transporte y sistemas de distribución. Sin embargo, el aprovechamiento ha sido
y sigue siendo muy desigual en todo el planeta. Así, los países
industrializados o del primer mundo son grandes consumidores de
energía eléctrica, mientras que los países en vías de
desarrollo apenas disfrutan de sus ventajas.

Una central hidroeléctrica es una instalación
donde se transforma la energía potencial (asociada a la altura) y cinética
(asociada al movimiento) en energía eléctrica.
- El agua cae desde la presa hasta unas
turbinas que se encuentran en su base. Al recibir la fuerza del agua las
turbinas comienzan a girar. Las turbinas están conectadas a unos generadores,
que al girar, producen electricidad. La electricidad viaja desde los
generadores hasta unos transformadores, donde se eleva la tensión para poder
transportar la electricidad hasta los centros de consumo.
Podemos ver todo esto con un sencillo dibujo:

PARTES
Las principales partes de una central de este
tipo son:
- Presa
La presa se encarga de mantener el agua en un
lugar alto para garantizar que tenga fuerza suficiente el agua como para mover
las turbinas
- Turbinas
Las turbinas se encargan de hacer girar el
generador cuando reciben la fuerza del agua
- Generador
Es el encargado de producir la electricidad.
Otras partes también importantes son las
tuberías que llevan el agua desde la presa hasta las turbinas.
En el siguiente dibujo podemos ver las partes
de una central hidroeléctrica.

1.
Agua
2. Presa
3. Rejas
filtradoras
4. Tubería
forzada
5. Conjunto
turbina-alternador
6. Turbina
7. Eje
8. Generador
9. Líneas eléctricas
10 Transformadore
Energía eólica
La
energía eólica es energía generada por la utilización del viento. Desde la
antigüedad, este tipo de energía ha sido utilizada por el hombre, sobre todo
para impulsar embarcaciones desarrollar la navegación y en los molinos de
viento.
En
la actualidad, la energía eólica, se considera una importante fuente de energía
porque es una fuente de energía limpia que no genera contaminación y no daña el
medio ambiente. Las grandes turbinas o aerogeneradores (especies de molinos de
viento), se colocan en áreas abiertas donde se puede obtener una buena cantidad
de viento. Y a través del movimiento capturado por un generador, se puede
generar electricidad. En la actualidad, sólo el 1% de la energía generada en el
mundo proviene de este tipo de fuente de energía eólica. Sin embargo, el
potencial de explotación es grande. En la actualidad, la capacidad mundial de
energía eólica de 238,4 GW (gigavatios).
Los
países que generan más energía eólica son: China (62.700 megavatios), Estados
Unidos (46.900 MW), Alemania (29.000 megavatios), España (21.600 MW), India
(16.000 MW), Francia (6800 MW), Italia (6700 MW), Reino Unido (6500 MW), Canadá
(5200 MW) y Portugal (4000 MW)

Para dar
inicio al mantenimiento de computadores es esencial conocer y manejar las
unidades eléctricas, conocer la forma de tomar las medidas, e identificar los
puntos básicos de entrada y salida de almacenamiento del PC.
Las tres
medidas básicas para realizar un primer análisis eléctrico son:
El
Voltaje: (V)
Unidad: Voltios símbolo Unidad: V
La
Corriente: (I)
Unidad: Amperios símbolo Unidad: A
La
Resistencia: (R)
Unidad: Ohmios símbolo Unidad Q
La
fórmula para relacionar estas tres cantidades es llamada la Ley de Ohm: V= R*I

Existe
una tercera cantidad eléctrica que es resultado de la combinación de tres
primeras, la potencia. Esta es nombrada muy a menudo como característica principal
de las fuentes de voltaje del PC, ya que entre más circuitos y dispositivos
constituyan al PC más potencia de salida de la fuente necesitaremos, Las
actuales placas o Mainboard necesitan fuentes con una salida de por lo
menos 450W y tiende a aumentar.
La
Potencia: (P)
unidad: Watios símbolo unidad: W
Formulas: P= V*I
Pasos para crear una cuenta en MEGA.
11) Abrimos el navegador

2 ) Introducimos la dirección
del MEGA https://mega.co.nz/

3 ) Vamos a la parte superior
donde dice " Create Account"

4) Ya una vez dado clic
tenemos que dar los datos requeridos por MEGA

5) Le damos clic en
"Create Account" donde les saldrá un cuadro de dialogo diciendo que
revisen el correo dado les a consejo que sea el de Gmail

6) Una vez que revisen el
correo le dan clic en el link y les saldrá un cuadro de dialogo al que deberán
insertar su contraseña


EJERCICIOS SOBRE LA LEY DE OHM

1) Calcule la intensidad de la corriente que aumenta una lavadora de juguete que tiene una resistencia
de 10 ohmios y funciona con una batería con una diferencia de potencia de 30 voltios

RESPUESTA
I= E/R = 30V/10Ω = 3 Amp
2) Calcula el voltaje, entre dos puntos del circuito de una plancha, por el que atraviesa una
corriente de 4 Amperios y presenta una resistencia de 10 ohmios
RESPUESTA
E= R*I = 10Ω*4A= 40V
3) Calcula la resistencia atravesada por una corriente con una intensidad de 5 Amperios
y una diferencia potencial de 10 Voltios
RESPUESTA
R= E/I= 10V/5A = 2Ω
4) Calcula la resistencia que presenta un conductor al paso de una corriente
con una tensión de 15 voltios y una intensidad de 3 Amperios
RESPUESTA
R= E/I = 15V/3A= 5Ω
5) Calcula la intensidad que lleva una corriente eléctrica por un circuito en el que se encuentra
una resistencia de 25 Ohmios y que presenta una diferencia de potencial entre los extremos
del circuito de 80 Voltios
RESPUESTA
I= E/R= 80V/25Ω= 3,2A
6) Calcula la tensión que lleva la corriente que alimenta a una cámara frigorífica
si tiene una intensidad de 2.5 Amperios y una resistencia de 500 ohmios
RESPUESTA
E= R*I= 500Ω*2,5A= 1250V
7) Calcula la intensidad de una corriente que atraviesa una resistencia de 5 Ohmios
y que tiene una diferencia de potencial entre los extremos de los circuitos de
105 Voltios
RESPUESTA
I= E/R= 105V/5Ω= 21A
8) Calcula la diferencia de potencia entre dos puntos de un circuito por el que atraviesa
una corriente de 8,4 Amperios y una resistencia de 56 ohmios
RESPUESTA
E= R*I= 56Ω*8,4A= 470,4V
9) calcula la intensidad de una corriente eléctrica que atraviesa una resistencia de
5 Ohmios y que tiene una diferencia de potencial entre los extremos del circuito
RESPUESTA
I= E/R= 50V/5Ω= 10A
10) Calcula la diferencia de potencial de un circuito por el que atraviesa una corriente
de 3 Amperios y una resistencia de 38 Ohmios
RESPUESTA
E= R*I= 38Ω*3A= 12,6V
SISTEMAS NUMÉRICOS
El ser humano ha buscado la forma de comunicarse con sus congéneres,
para esto encontró medios como el dibujo, el lenguaje escrito y
el habla;para representar cantidades ideó el sistema numérico, siendo el mas
utilizado el sistema numérico de naturales N{0,1,2,3...9}.
Los avances tecnológicos han exigido que el sistema numérico sea
compatible con el uso tecnológico.
SISTEMA DECIMAL


SISTEMA DE NUMERACIÓN BINARIO
El sistema de numeración binario utiliza solo dos dígitos, el cero (0) y el uno (1).
En una cifra binaria, cada dígito tiene distinto valor dependiendo de la posición que ocupe.
El valor de cada posición es el de una potencia de base 2 elevada en un exponente igual a la posición del dígito menos uno. Se puede observar que, tal y como ocurría con
el sistema decimal, la base de la potencia coincide con la cantidad de dígitos utilizados (2)
para representar los números. De acuerdo con estas reglas, el numero binario 1011
tiene un valor que se calcula así:
8)

0*20=0
Actividad de números binarios
0*20=0
1*20=1
10= 1*21+0*20=2
11=1*21+1*20=3
100=1*22+0*21+0*20=
4
101=1*22+0*21+1*20=5
110=1*22+1*21+0*20=6
111=1*22+1*21+1*20=7
1000=1*23+0*22+0*21+0*20=8
1001=1*23+0*22+0*21+1*20=9
1010=1*23+0*22+1*21+0*20=10
1011=1*23+0*22+1*21+1*20=11
1100=1*23+1*22+0*21+0*20=12
1101=1*23+1*22+0*21+1*20=13
1110=1*23+1*22+1*21+0*20=14
1111=1*23+1*22+1*21+1*20=15
10100=1*24+0*23+1*22+0*21+0*20=20
11001=1*24+1*23+0*22+0*21+1*20=25
11110=1*24+1*23+1*22+1*21+0*20=30
101000=1*25+0*24+1*23+0*22+0*21+0*20=40
110010=1*25+1*24+0*23+0*22+1*21+0*20=50
1100100=1*26+1*25+0*24+0*23+1*22+0*21+0*20=100
11001000=1*27+1*26+0*25+0*24+1*23+0*22+0*21+0*20=200
111110100=1*28+1*27+1*26+1*25+1*24+0*23+1*22+0*21+0*20=500
Discos duros

Es un dispositivo de almacenamiento removible "no critico"; La tecnología de los discos duros ha evolucionado, pasando por conectores IDE, SCSI y SATA. Los discos duros IDE actualmente "en desuso" tiene 39 pines. Internamente el disco duro tiene uno o mas platos en los que se almacena la información, estos discos giran a 5400 RPM (revoluciones por minuto) o 7200 RPM. Los discos duros SCSI se utilizan en equipos que ejercen la función de servidores, tienen 64 pines, esto permite el flujo de información mas efectiva.
Es un dispositivo de almacenamiento removible "no critico"; La tecnología de los discos duros ha evolucionado, pasando por conectores IDE, SCSI y SATA. Los discos duros IDE actualmente "en desuso" tiene 39 pines. Internamente el disco duro tiene uno o mas platos en los que se almacena la información, estos discos giran a 5400 RPM (revoluciones por minuto) o 7200 RPM. Los discos duros SCSI se utilizan en equipos que ejercen la función de servidores, tienen 64 pines, esto permite el flujo de información mas efectiva.
Reconocimiento de la fuente
Una fuente de poder tiene varias tramos de cables, los cuales finalizan en diferentes conectores, a continuación se describe algunos de ellos:
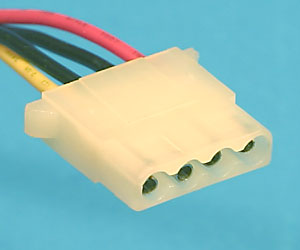
Este es el clásico conector Molex, utilizado para piezas diversas, tales como discos duros, unidades ópticas y algunos colores. Maneja tensiones de 5 y 12 Voltios.

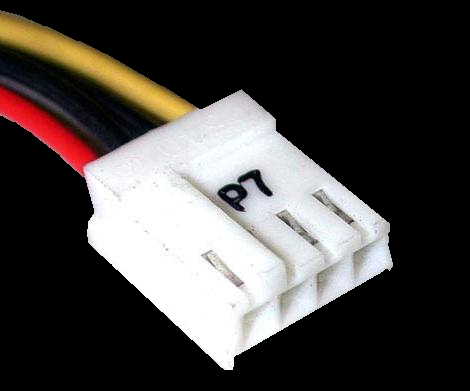
Aquí vemos el conector Berg, se emplea para disquetes y algunos placas de vídeo que necesitan refuerzo en su alimentación. Es importante aclarar que este conector esta quedando obsoleto.
Este conector conocido como ATX 12V fue introducido junto al procesador Pentium 4, contiene dos cables de 12V para reforzar la alimentación de la CPU y suele ubicarse cerda de la etapa de alimentación de este.

Este es el conector ATX 2,0 que consta de 20 pines y tiene todas las lineas del voltaje necesarios para el funcionamiento de la placa madre. Este conector fue reemplazado por el de 24 pines.
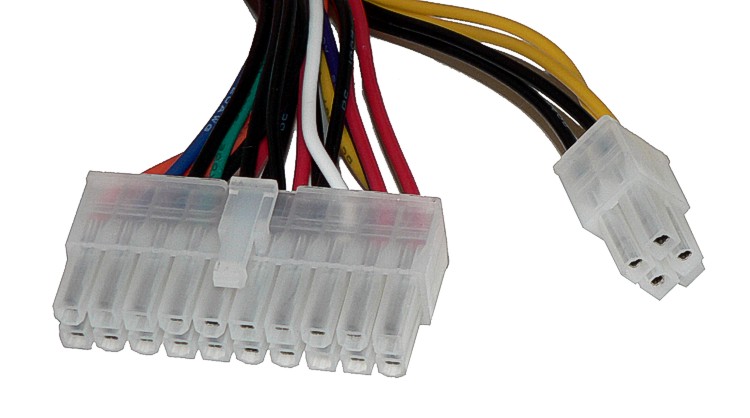
Esta es la evolución del conector ATX, en su versión 2.0. Agrega cuatro pines que refuerzan las lineas de tensión. En algunos sistemas pueden usarse fuentes ATX 1.0 sin problemas (ADM), mientras que INTEL requiere del uso de una 2.0 o bien de un adaptador (que no es lo mas recomendable).

El conector SATA es el nuevo parámetro para discos duros. Su función es permitir la conexión en caliente de estos componentes (es decir, con el equipo en funcionamiento).

Este conector PCI-E 1.0 se puede utilizar en placas de vídeo y aporta un refuerzo a la alimentación mediante sus 12 Voltios.

La evolución del conector anterior es el PCI-E. que agrega otra linea de 12 voltios como refuerzo.


COMO DESINSTALAR UN PROGRAMA
MANTENIMIENTO DE SOFTWARE
Origen y
características del sistema operativo Linux
Historia del Linux
Linux fue creado
originalmente por Linus Torvald en la Universidad de Helsinki
en Finlandia, siendo él estudiante de informática. Pero ha
continuado su desarrollado con la ayuda de muchos otros programadores a través
de Internet.
Linux originalmente inicio el desarrollo del núcleo como su proyecto
favorito, inspirado por su interés en Minix, un pequeño sistema
Unix desarrollado por Andy Tannenbaum. Él se propuso a crear lo que en sus
propias palabras sería un "mejor Minix que el Minix".
El 5 de octubre de
1991, Linux anuncio su primera versión "oficial" de Linux, versión
0.02. Desde entonces, muchos programadores han respondido a su llamada, y han
ayudado a construir Linux como el sistema operativo completamente funcional que
es hoy
Que es Linux
Linux es un sistema operativo diseñado por cientos de
programadores de todo el planeta, aunque el principal responsable del proyecto
es Linus Tovalds. Su objetivo inicial es propulsar el software de libre distribución junto con su código fuente para que pueda ser
modificado por cualquier persona, dando rienda suelta a la creatividad. El hecho de que el
sistema operativo incluya su propio código fuente expande enormemente las
posibilidades de este sistema. Este método también es aplicado en numerosas ocasiones a los
programas que corren en el sistema, lo que hace que podamos encontrar
muchisimos programas útiles totalmente gratuitos y con su código fuente. Y la
cuestión es que, señores y señoras, Linux es un
sistema operativo totalmente gratuito.
Características principales del sistema operativo
Linux
Libre, cualquiera lo puede usar, modificar y distribuir.
· Gratis, tantas licencias como se desee.
· Desarrollado por miles de voluntarios en el mundo. Cualquiera puede participar y pertenecer a la comunidad.
· Código fuente abierto a todos.
· Alta estabilidad, por lo que es difícil que se quede colgado.
· Extremadamente seguro ya que tiene varios sistemas de protección.
· Facilidad de uso en muchas tareas.
· Lee y escribe en sistemas de archivos de Windows y Macintosh.
· Se comunica con cualquier otro sistema en red.
· Las distribuciones se basan en escritorios de ventana como KDE o Gnomo.
· Necesita bajos requerimientos de Hardware.
· Ocupa poca memoria debido a la sencillez de UNIX.
· Posee mejores controladores gráficos.
· Los dispositivos funcionan más rápido.
· Desarrollado por miles de voluntarios en el mundo. Cualquiera puede participar y pertenecer a la comunidad.
· Código fuente abierto a todos.
· Alta estabilidad, por lo que es difícil que se quede colgado.
· Extremadamente seguro ya que tiene varios sistemas de protección.
· Facilidad de uso en muchas tareas.
· Lee y escribe en sistemas de archivos de Windows y Macintosh.
· Se comunica con cualquier otro sistema en red.
· Las distribuciones se basan en escritorios de ventana como KDE o Gnomo.
· Necesita bajos requerimientos de Hardware.
· Ocupa poca memoria debido a la sencillez de UNIX.
· Posee mejores controladores gráficos.
· Los dispositivos funcionan más rápido.
Que es el
kernel
El Kernel,
o núcleo, se refiere al Software que
relaciona las aplicaciones con el Hardware de
nuestro ordenador. Las órdenes del Kernel son las
únicas que interactúan directamente con los componentes físicos del ordenador,
como el procesador, la RAM o los discos duros, ya que están expresamente
diseñadas para no dañar estos elementos. Las instrucciones del Kernel también
son las encargadas de asignar los recursos a cada proceso y decidir que
prioridades y recursos del sistema se le asignan.
Que es el Shell
El Shell,
o intérprete de órdenes, son aplicaciones capaces de interpretar las órdenes del usuario a través de
comandos escritos, como por ejemplo el sistema MS-DOS o los terminales
de consola de los sistemas operativos Linux. Estas aplicaciones
permiten al usuario interactuar con el ordenador, normalmente a través de una
sencilla interfaz de texto plano,
y suponen la forma más básica de interacción de un usuario con su ordenador,
escribiendo las órdenes en este Shell a
través de comandos y recogiendo las respuestas de la máquina.
Ventajas de Linux
Gratuito: Existen versiones pagadas, pero son
baratas.
Libre:
Es código abierto, puedes
ver el fuente y mejorarlo o armarlo a medida.
Personalizable:
Debido a que puedes usar
un sin fin de sistemas de escritorios y de ventanas. El mundo Linux no es
homogeneo, dentro de este tendrás que hacer varias decisiones más.
Flexible:
Tanto para servers como
para pc de escritorio o para lo que quieras, linux no tiene topes de uso y se
adapta a tus necesidades gracias a la gran cantidad de distribuciones
existentes.
Rápido:
Sin duda de mis
características favoritas. El código de GNU/Linux es eficiente y está escrito
de forma inteligente debido a los millones de usuarios que contribuyen al
proyecto. Los recursos para correrlo suelen ser bajos. Con muchas aplicaciones
a disposición: Y por cierto muy fáciles de instalar desde repositorios, solo se
descargan e instalan automáticamente.
Seguro:
Linux no tiene virus,
esto se debe a su forma de administrar los permisos del sistema. La única
manera de que un programa con código malicioso corra en tu pc con linux es que
el usuario administrador lo permita.
Innovador: GNU/Linux suele ser sinónimo de
innovación. Muchas ideas nuevas surgen de parte del software libre. Por
ejemplo, las dll de windows (librerías dinámicas) no es más que una burda copia
de las librerías en windows, que siempre han sido dinámicas.
Versiones de
linux
1)Ubuntu la mas popular y usada.Es
derivada de Debian.Viene con escritorio Gnome.Es ideal para el usuario
principiante
2)Kubuntu similar a Ubuntu pero con escritorio KDe que es mas parecido al de Windows
3)Linux Mint main una variante de Ubuntu pero mas sencilla porque ya trae los codecs de audio video y flash player instalados por defecto.Ademas es muy bonita
4)Fedora con escritorio Gnome o KDE.Tambien muy popular.Es derivada de la famosa Red Hat .Es bastante innovadora y configurable
5)Mandriva One tambien puede elegirse con que escritorio utilizarla.Yo en esta distro te recomiendo con KDE que esta bien implementado
6)Pc Linux radicalmente simple de buen funcionamiento
Puedes elegir la version entre varios escritorios
7)Debian estable.Una distribucion que ha dado origen a muchas otras.Famosa por su confiabilidad y por la cantidad de paquetes que hay disponible para ella.Una gran opcion pero requiere un poquito mas de conocimientos para ponerla a punto
8)Open Suse de la empresa germana Novell.Muy bonita y con un buen instalador ideal con KDE
9)CentOS Una distribucion que es el clon exacto de la famosa Red Hat Enterprise Linux que se usa en corporaciones como servidor.A diferencia de esta ultima CentOS es gratuita
Cuantas particiones se requiere para instalar Linux
La respuesta
rápida y fácil es: recomendable al menos dos, una para el sistema/datos y otra
para Swap. Usualmente se suelen tener tres, una para el sistema/programas (/),
otra para los datos (/home) y otra para swap.
La respuesta larga y no tan fácil es mas complicada de explicar: Todo dependerá muchísimo del uso que se le vaya a dar al sistema.
Para sistemas que se utilicen de forma particular y por uno o pocos usuarios bastara con las dos/tres particiones antes mencionadas, esto evitara los problemas de saber que cantidad de espacio necesitan las diferentes particiones y el quedarnos sin espacio en alguna partición vital, mientras que nos sobra en otras.
Para sistemas servidores, con gran cantidad de servicios y usuarios es muy recomendable tener varias particiones/discos. Existe un documento (HOWTO: Multi Disk System Tuning) muy bueno y quizas complicado para el principiante que explica cuantas particiones y discos y que tamaño deberían tener en función del uso que se le vaya a dar al sistema, lo puedes encontrar en http://www.nyx.net/~sgjoen/disk.html o en cualquier
La respuesta larga y no tan fácil es mas complicada de explicar: Todo dependerá muchísimo del uso que se le vaya a dar al sistema.
Para sistemas que se utilicen de forma particular y por uno o pocos usuarios bastara con las dos/tres particiones antes mencionadas, esto evitara los problemas de saber que cantidad de espacio necesitan las diferentes particiones y el quedarnos sin espacio en alguna partición vital, mientras que nos sobra en otras.
Para sistemas servidores, con gran cantidad de servicios y usuarios es muy recomendable tener varias particiones/discos. Existe un documento (HOWTO: Multi Disk System Tuning) muy bueno y quizas complicado para el principiante que explica cuantas particiones y discos y que tamaño deberían tener en función del uso que se le vaya a dar al sistema, lo puedes encontrar en http://www.nyx.net/~sgjoen/disk.html o en cualquier
servidor con
documentación Howto. Otro documento (HOWTO: Linux Partition) , se puede
encontrar en http://tldp.org/HOWTO/Partition/ .
https://mega.co.nz/#!WEpD0RxA!CdTKMVIlsE7lKbdIoxtN5SKuyrQpeOZFTy79jG_U4a0
EVIDENCIAS DE PSEINT
NÚMEROS MAYOR Y MENOR
NÚMEROS MAYOR Y MENOR 3 NUMEROS
https://mega.co.nz/#!jJxw2LIY!sSDoHqjHUExbUlk23zeD73akv-3HWxoitf4h5pF5QZU
NÚMEROS PAR O IMPAR
https://mega.co.nz/#!WMoyADyA!lkReK7A0dim84Fi5CbHTIIB_zt-vI7o_3G-v3mRutVk
No hay comentarios:
Publicar un comentario